Quadcopter Biplane
Summary: I’m a member of the aerodynamics sub-team on TAMU Vertical Flight Design, which designed and built an award winning quadcopter biplane for the National Vertical Flight Society Student Design Competition in April 2024. My main responsibility was designing our cowling in Solidworks and using Solidworks Flow Simulation to perform CFD analysis to create the optimal cowling. In addition, I created computational models in Python and Excel to calculate our optimal wing dimensions for our targeted aspect ratio, wing loading, and wing weight. I also learned the process of airfoil selection through CFD analysis in both Ansys and XFLR5. Finally, I’ve worked on the fabrication of the wings, specifically sanding them and applying MonoKote. Read our full technical report here, and read the press release commemorating our win here.

Our finished aircraft flying (and winning) at the competition in Maryland
I joined Aggies Vertical Flight at the start of my first semester of freshman year. Coincidentally, AVF was also in its first year as a design team. I think that I truly grew with the design team, as I went from having absolutely zero aerodynamics knowledge to creating computational models in Python to calculate wing dimensions for our optimal aspect ratio, wing loading, and weight reduction, while at the same time the team went from an unorganized group of aerospace engineers to a slightly less unorganized group of aerospace engineers. All jokes aside, we really did come together as the year went on to create a really fricking cool aircraft, and I can’t wait to see it fly competition.
I know what you’re probably thinking, “What the heck is a quadcopter biplane?” Don’t worry, that’s exactly what I thought when someone first proposed it as a potential design for our competition aircraft. By the way, the National VFS Student Design Competition is held every year at the University of Maryland. Sixteen teams attempt to design and build a revolutionary eVTOL aircraft capable of carrying a minimum of 2 pounds with a maximum total takeoff weight of 20 pounds. The aircraft are judged based on how many laps they can complete in 10 minutes, an autonomous lap, a presentation, and the technical report. A total of $5,000 is at stake, with first place receiving $2,250.
Back to the original question. A quadcopter biplane has four rotors in a configuration similar to a standard quadcopter. The twist is that there are two wings connected to the propellors for forward flight. Essentially, the aircraft takes off vertically using the propellors, then flips 90 degrees to fly as a biplane. While the transition is incredibly difficult, the overall forward flight efficiency receives a major boost compared to a traditional quadcopter.
The completed CAD file for our quadcopter biplane
Now I’m sure you’re wondering what I did. As a member of the Aerodynamics sub-team my preliminary efforts focused on our wing and propellor dimensions and flight calculations. Based on research and calculations, we knew the minimum space needed between propellors in order to minimize interaction forces, as well our optimal wing spacing. Using this information, I created functions in Python and Excel to calculate wing load, aspect ratio, and weight as a function of the diameter of our propellors, allowing us to choose the optimal prop size for our aircraft. In addition, I spent a lot of time learning about essential aerodynamics concepts and equations from senior team members, such as lift, drag, thrust, v infinity, disc loading, camber, and many more. Finally, I learned the basics of using Ansys and XFLR5 for airfoil analysis.
My main task for the past three months has been designing an optimal cowling to both protect all the electronics on our main plate and minimize induced drag. This proved to be especially difficult for a variety of reasons, the first being that there is almost no research on nose cones at subsonic speeds, much less at measly speeds of 30-40 miles per hour. While I knew the nose cone shape would have to be blunt in order to maintain aerodynamic efficiency at a wide range of angles of attack thanks to the brutal transition, the lack of subsonic nose cone literature meant I had no clue which one of the many cone shapes would perform the best.

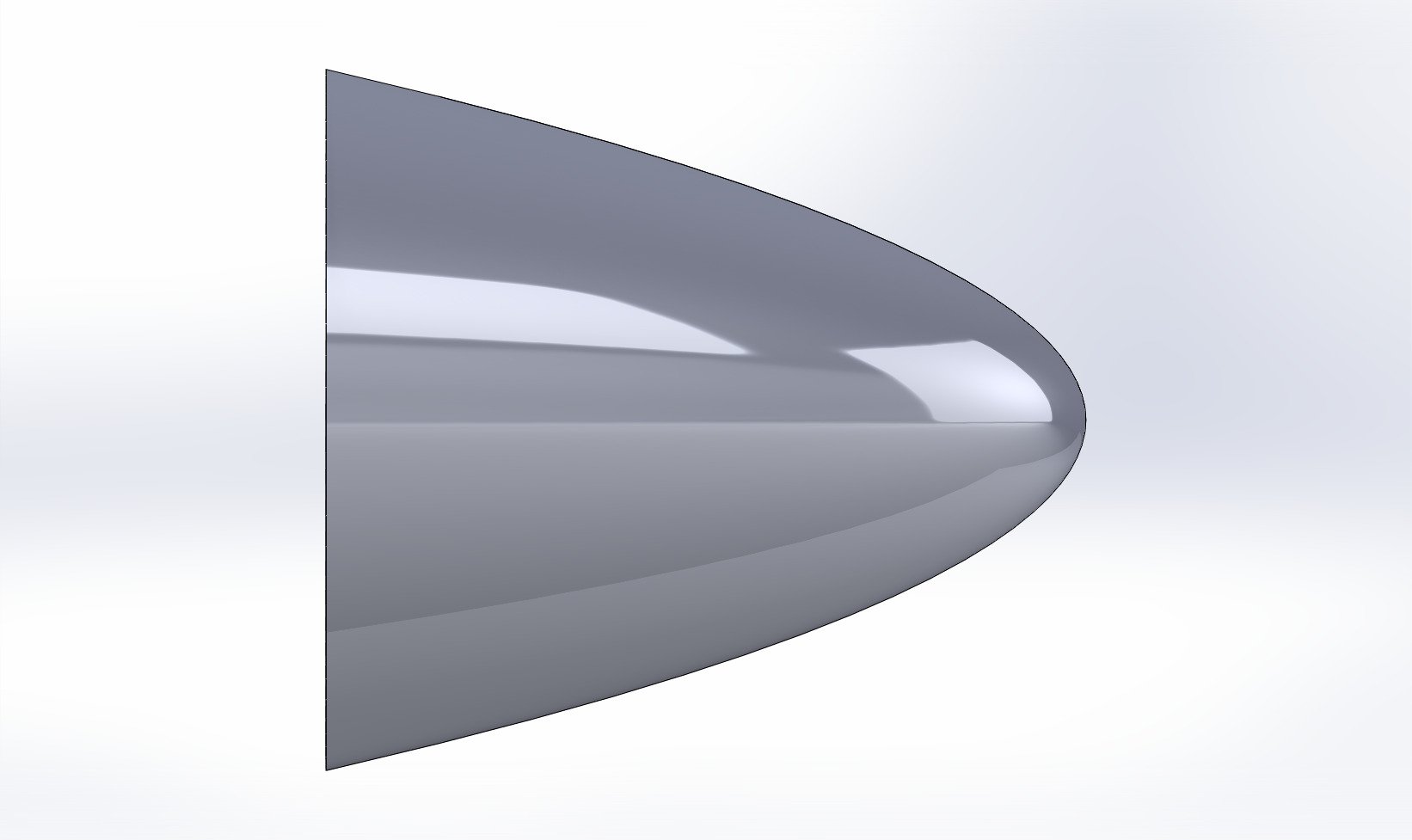


I choose to analyze the above four shapes found in The Descriptive Geometry of Nose Cones as they have blunter tips and exhibited superior aerodynamic characteristics at subsonic speeds of Mach 0.8, which was still significantly faster than our aircraft (Crowell Sr., 1996). I used an equation based curve to create the shapes in Solidworks, then used Solidworks’ CFD software Flow Simulation to analyze the coefficients of drag and lift for each shape at an airspeed of 30 miles per hour under STP at angles of attack ranging from 0 degrees all the way to 90. While I expected the 0.5 power series to come out on top due to its popularity and efficiency for low speed rockets, surprisingly the elliptical cone ended up having the least drag and the most lift from 0 to 20 degrees. This made it the most optimized shape for our forward flight mode and was therefore chosen for our final design.


The design of the full cowling was also done in Solidworks by lofting a square base up to a circle using smooth concave guide curves (although not as smooth as they could have been due to issues with manufacturing), and then plopping our elliptical cone on top of the circle. The cowling was then 3D printed with PETG. We used heat set inserts to create threads in the cowling, which was then attached to the main plate with screws. In addition, I also helped with the manufacturing process of the wings. As a freshman, I was responsible for the incredibly fun and not tedious whatsoever process of sanding and applying monokote to our wings (made with insulated foam to save weight).
Thankfully, the year long grind paid off. In our team’s inaugural year with limited budget, WE WONNN!!! That’s right, we took home the top overall prize in the National VFS DBF (design build fly) competition, beating out established powerhouses Maryland and Georgia Tech. Our quad biplane ended up dominating in the flight aspect of the competition, posting a superior payload fraction and completing significantly more laps around the course than the other teams. While we still have significant room for improvement—especially in our technical report— we’re all ecstatic to take home the first place award. I learned so much through this entire process, and am so grateful to be a part of this team.